Лекция
Сразу хочу сказать, что здесь никакой воды про био-вдохновленная робототехника, и только нужная информация. Для того чтобы лучше понимать что такое био-вдохновленная робототехника, природоподобная робототехника, мягкие роботы , настоятельно рекомендую прочитать все из категории Робототехника.
Роботизированное движение, вдохновленное биологией, - это довольно новая подкатегория дизайна, вдохновленного биологией. Речь идет об изучении концепций, полученных от природы, и применении их при проектировании реальных инженерных систем. В частности, эта область посвящена созданию роботов, вдохновленных биологическими системами. Иногда путают биомимикрию и биоразнообразие . Биомимикрия копирует у природы, в то время как био-вдохновленный дизайн учится у природы и создает механизм, который проще и эффективнее, чем система, наблюдаемая в природе. Биомимикрия привела к развитию другой отрасли робототехники, называемой мягкой робототехникой.. Биологические системы оптимизированы для решения конкретных задач в соответствии с их средой обитания. Однако они многофункциональны и не предназначены только для одной конкретной функции. Робототехника, вдохновленная биологией, изучает биологические системы и ищет механизмы, которые могут решить проблему в области инженерии. Затем разработчик должен попытаться упростить и улучшить этот механизм для конкретной интересующей задачи. Робототехники, вдохновленные биологией , обычно интересуются биосенсорами (например, глазом ), биоактуаторами (например, мышцами ) или биоматериалами (например , паучьим шелком ). У большинства роботов есть система передвижения. Таким образом, в этой статье представлены различные способы передвижения животных. представлены несколько примеров соответствующих био-вдохновленных роботов.
Биолокацию или передвижение животных обычно подразделяют на следующие категории:
Передвижение по поверхности может включать наземное и древесное передвижение . Мы подробно обсудим наземные передвижения в следующем разделе.
Передвижение в кровотоке или средах с культурой клеток, плавание и полет . Есть много плавающих и летающих роботов, спроектированных и построенных робототехниками. Некоторые из них используют миниатюрные двигатели или обычные приводы MEMS (например, пьезоэлектрические, тепловые, магнитные и т.д..) , в то время как другие используют мышечные клетки животных в качестве двигателей.
Многие животные и насекомые передвигаются по суше с ногами или без них. В этом разделе мы обсудим передвижение на ногах и без конечностей, а также лазание и прыжки. Закрепление ступней - основа передвижения на суше. Возможность увеличения тяги важна для движения без скольжения по таким поверхностям, как гладкие скалы и лед, и особенно важна при движении в гору. Существуют многочисленные биологические механизмы обеспечения покупки: когти полагаются на механизмы, основанные на трении; ноги геккона на силы стен ван дер; и ноги некоторых насекомых - из-за адгезионных сил, опосредованных жидкостью.
У роботов на ножках может быть одна две, четыре, шесть, или много ног в зависимости от приложения. Одно из главных преимуществ использования ног вместо колес - более эффективное перемещение по неровной поверхности. Двуногие , четвероногие и гексапедальные движения являются одними из самых любимых видов передвижения на ногах в области био-вдохновленной робототехники. Rhex , надежный шестигранный робот и Cheetah , на сегодняшний день являются двумя самыми быстрыми роботами. iSprawl - еще один гексапедальный робот, вдохновленныйдвижение тараканов , разработанное в Стэнфордском университете. Этот робот может двигаться со скоростью до 15 человек в секунду и развивать скорость до 2,3 м / с. Об этом говорит сайт https://intellect.icu . Первоначальная версия этого робота имела пневматический привод, в то время как новое поколение использует один электродвигатель для передвижения.
Рельеф, включающий топографию в различных масштабах длины, может быть сложной задачей для большинства организмов и биомиметических роботов. Такой ландшафт легко преодолевают безногие организмы, например змеи. Некоторые животные и насекомые, включая червей , улиток , гусениц и змей , способны к передвижению без конечностей. Обзор змееподобных роботов представлен Hirose et al. [18]Эти роботы можно разделить на роботов с пассивными или активными колесами, роботов с активными гусеницами и волнистых роботов, использующих вертикальные волны или линейные расширения. Большинство змееподобных роботов используют колеса, которые имеют высокое трение при движении из стороны в сторону, но низкое трение при движении вперед (и их можно предотвратить от откатывания назад). Большинство змееподобных роботов используют либо боковую волнистость, либо прямолинейное движение и испытывают трудности при подъеме по вертикали. Choset недавно разработал модульного робота, который может имитировать несколько змеиных походок, но не может выполнять движения гармошкой . [19]Исследователи из Технологического института Джорджии недавно разработали двух змееподобных роботов под названием Scalybot. Основное внимание в этих роботах уделяется роли вентральных чешуек змеи в регулировке фрикционных свойств в разных направлениях. Эти роботы могут активно управлять своими весами, изменять их фрикционные свойства и эффективно перемещаться по различным поверхностям. Исследователи из CMU разработали как масштабируемых , так и обычных управляемых змееподобных роботов.
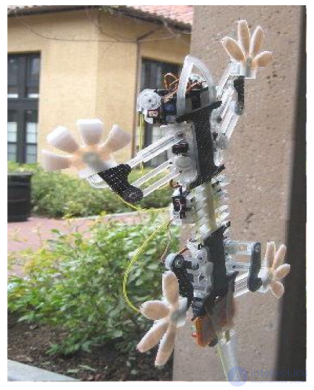
Скалолазание - особенно сложная задача, потому что ошибки, допущенные альпинистом, могут привести к тому, что он потеряет хватку и упадет. Большинство роботов построены вокруг единственной функции, наблюдаемой у их биологических аналогов. Geckobots [23] обычно используют силы Ван-дер-Ваальса, которые действуют только на гладких поверхностях. Stickybots, используют направленные сухие клеи, которые лучше всего работают на гладких поверхностях. Spinybot и робот RiSE относятся к числу роботов, похожих на насекомых, которые вместо этого используют шипы. Legged роботы восхождениеимеют несколько ограничений. Они не могут справиться с большими препятствиями, так как они негибкие и требуют большого пространства для перемещения. Обычно они не могут взбираться как по гладкой, так и по шероховатой поверхности, а также не могут справиться с вертикальными и горизонтальными переходами.
Одна из задач, которые обычно выполняют самые разные живые организмы, - это прыжки . Бхарал , зайцы , кенгуру , кузнечик , блоха и саранча - одни из лучших прыгающих животных. В EPFL был разработан миниатюрный прыгающий робот весом 7 граммов, вдохновленный саранчой, который может прыгать до 138 см. Событие прыжка вызывается снятием напряжения пружины. Миниатюрный робот с самым высоким прыжком, вдохновленный саранчой, весит 23 грамма, а его самый высокий прыжок до 365 см - это TAUB (Тель-Авивский университет и инженерный колледж Брауде). Он использует торсионные пружины в качестве накопителя энергии и включает в себя проволочный и защелкивающий механизм для сжатия и освобождения пружин. ETH Zurich сообщил о создании робота для мягкого прыжка, основанного на сжигании метана и веселящего газа . Тепловое расширение газа внутри мягкой камеры сгорания резко увеличивает объем камеры. Это заставляет робота весом 2 кг подпрыгивать на 20 см. После приземления мягкий робот, вдохновленный неуклюжей игрушкой, переориентируется в вертикальное положение.
Чтобы сделать своего робота достаточно эффективным, ученые взяли за основу форму ушастой аурелии (Aurelia aurita) на этапе личинки. Тогда как в предыдущих дизайнах медуз-роботов применялись различные механизмы тяги, теперь команда решила использовать гидравлические сети, которые будут приводить машину в движение.
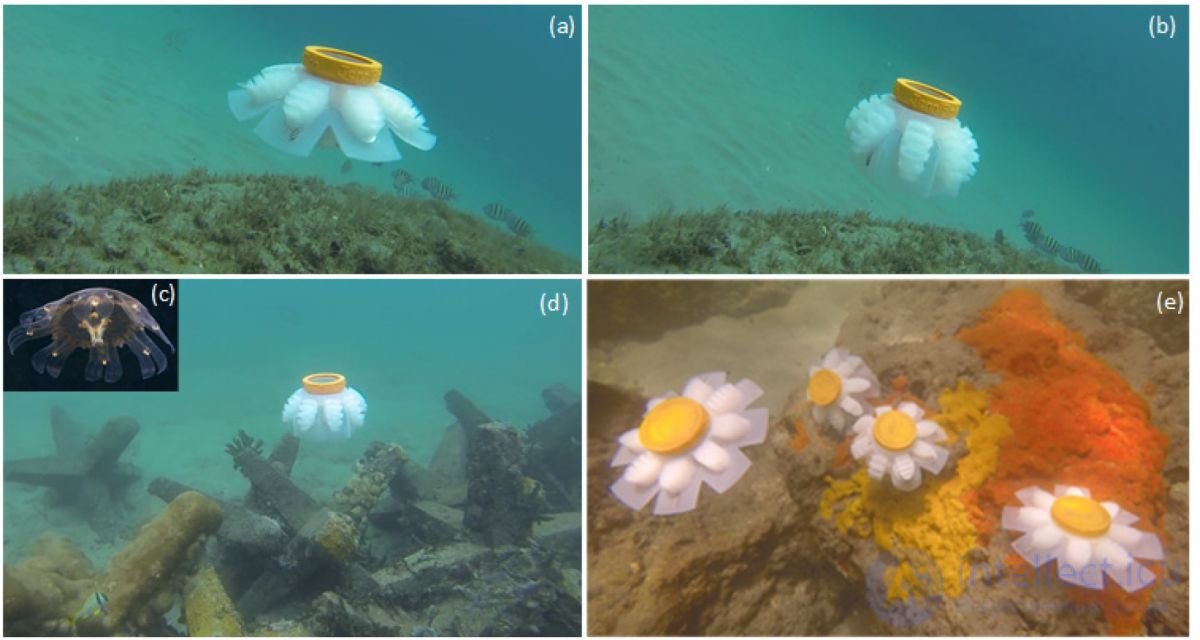
«Главное применение робота — исследование и мониторинг деликатных экосистем, именно поэтому мы используем приводы из гидравлических сетей, чтобы предупредить непреднамеренные повреждения. К тому же живые медузы сами по себе плавучие. Чтобы сымитировать это свойство, мы использовали воду для наполнения приводов гидравлической сети при плавании», — говорит доктор Энгерберг.
Для того чтобы медуза могла маневрировать, команда задействовала два рабочих колеса насоса и накачала восемь щупалец. Дизайн рабочего колеса насоса предоставил открытый поток воды, в котором вода из окружающей среды закачивалась в мягкие приводы для воспроизведения плавательного рывка. Когда насосы отключались, эластичность силиконового материала в приводах щупалец сжимала приводы для обратного выброса воды во время фазы релаксации. Новый дизайн также помог избавиться от винтов, упростив управление, размеры и снизив стоимость разработки.
Команда распечатала пять разных медуз-роботов на 3D-принтере, применив силиконовую резину для приводов. Всех роботов сделали различающимися по жесткости, чтобы испытать влияние этого свойства на эффективность тяги. Ученые также проверили способность робота сжиматься при прохождении через узкие участки, используя для этого круглые отверстия в пластинах из оргстекла.
«Оказалось, роботы могли проплывать через отверстия уже своего номинального диаметра. В контрольный алгоритм робота мы планируем встроить датчики окружающей среды вроде сонара вместе с навигационным алгоритмом. Это поможет ему находить отверстия и определять, может ли он через них проплыть».
Подсчитано, что при плавании некоторые рыбы могут достичь эффективности движения более 90%. Кроме того, они могут ускоряться и маневрировать намного лучше, чем любая искусственная лодка или подводная лодка, и производят меньше шума и помех от воды. Поэтому многие исследователи, изучающие подводных роботов, хотели бы скопировать этот тип передвижения. Известными примерами являются роботизированная рыба G9 из Университета компьютерных наук Эссексского университета и робот-тунец, построенный Институтом полевой робототехники для анализа и математического моделирования грозового движения . Аквапингвин, спроектированный и изготовленный немецкой компанией Festo, копирует обтекаемую форму и движение передними «ластами» пингвинов . Компания Festo также создала модели Aqua Ray и Aqua Jelly, которые имитируют движения ската манты и медузы соответственно.
В 2014 году iSplash- II был разработан докторантом Ричардом Джеймсом Клэпхэмом и профессором Хуошенг Ху из Университета Эссекса. Это была первая рыба-робот, способная превзойти настоящую рыбу-панцирь с точки зрения средней максимальной скорости (измеряется в длинах тела в секунду) и выносливости, продолжительности поддержания максимальной скорости. Эта сборка достигла скорости плавания 11,6 л / с (т. Е. 3,7 м / с). Первая сборка, iSplash -I (2014), была первой роботизированной платформой, в которой применялось плавательное движение в форме черепа, которое, как было обнаружено, увеличивало скорость плавания на 27% по сравнению с традиционным подходом с использованием задней ограниченной формы волны.
Модульные роботы обычно могут выполнять несколько задач и особенно полезны для поисково-спасательных или исследовательских миссий. Некоторые из представленных роботов в этой категории включают робота в стиле саламандры, разработанного в EPFL, который может ходить и плавать , робота, вдохновленного змеями, разработанного в Университете Карнеги-Меллона, который имеет четыре различных режима передвижения по земле, и таракана. Вдохновленный робот может бегать и лазить по разнообразной сложной местности.
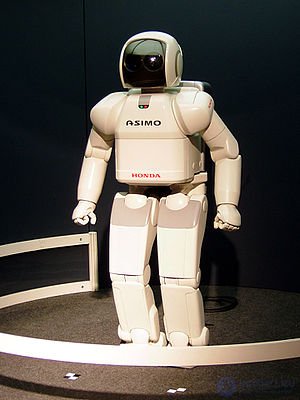
Гуманоидные роботы - это роботы, которые похожи на людей или вдохновлены человеческой формой. Существует много различных типов роботов-гуманоидов для таких приложений, как личная помощь, прием, работа в промышленности или товарищеские отношения. Этот тип роботов также используется в исследовательских целях и изначально был разработан для создания более совершенных ортезов и протезов для людей. Петман - один из первых и наиболее совершенных роботов-гуманоидов, разработанных в Boston Dynamics. Некоторые из роботов-гуманоидов, такие как Honda Asimo, находятся в состоянии перегрузки. С другой стороны, есть роботы-гуманоиды, такие как робот, разработанный в Корнельском университете, у которых нет приводов и они пассивно спускаются по пологому склону.
Коллективное поведение животных интересует исследователей уже несколько лет. Муравьи могут строить конструкции, похожие на плоты, чтобы выжить на реках. Рыбы могут более эффективно ощущать окружающую среду в больших группах. Робототехника Swarm - довольно новая область, и ее цель состоит в том, чтобы создавать роботов, которые могут работать вместе и передавать данные, создавать структуры в составе группы и т.д..
Мягкие роботы - это роботы, полностью состоящие из мягких материалов и движущиеся под действием пневматического давления, как осьминоги или морские звезды . Такие роботы достаточно гибки, чтобы перемещаться в очень ограниченном пространстве (например, в теле человека). Первые многогранные мягкие роботы были разработаны в 2011 году , а первый полностью интегрированный, независимый мягкий робот (с мягкими батареями и системами управления) был разработан в 2015 году
А как ты думаешь, при улучшении био-вдохновленная робототехника, будет лучше нам? Надеюсь, что теперь ты понял что такое био-вдохновленная робототехника, природоподобная робототехника, мягкие роботы и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника



Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника